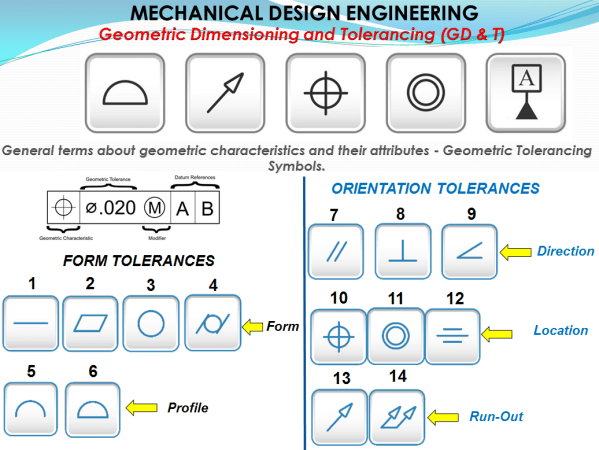
Geometric Dimensioning And Tolerancing defines a functionality of a part and because the part drawing is the first tool people use in order to manufacture a part, the designer must clearly specify all the necessary characteristics which will communicate further how that part must be produced and how it will finally work. The part drawing... Continue Reading →
MECHANICAL DESIGN ENGINEERING – GD + T – General terms about geometric characteristics and their attributes.